Please follow these steps below :
3.1. Introduction
The Gremsy’s Gimbal that can communicate with Ardupilot (Copter) using Mavlink
NOTE: Support for this Gimbal is include in Copter 3.3 (or higher) for gimbals running.
- T1: gremsyT1_v605 or above
- T3: gremsyT3_v605 or above
- S1: gremsyS1_v605 or above
- Pixy: gremsyF_v605 or above
- gTuneDesktop: gTuneDesktop_v135_Beta or above
3.2. What’s New?
- Support Ardupilot (Copter) remote in Single mode
- Support the advance features likeautomated aiming of the camera at a Region of Interest (ROI).
- Support DO_MOUNT_CONTROL (Ardupilot will send angle requests to gimbal)
- Drift free horizon
- Gimbal (or mount) send a HEARTBEAT(e.g. every second) just like any other MAVLink component. Additionally, it can send feedback about the angles it's pointing using the message MOUNT_ORIENTATION.
3.3. Connecting the gimbal to the Pixhawk
Connect cable from COM2 port on Hyper Quick release to Telem2 or Telem1 on Pixhawk.
Baurate on Pixhawk should be set at :
- 115200bps,
- 8 Data bits
- No Parity,
- 1 Stop Bit (8N1)
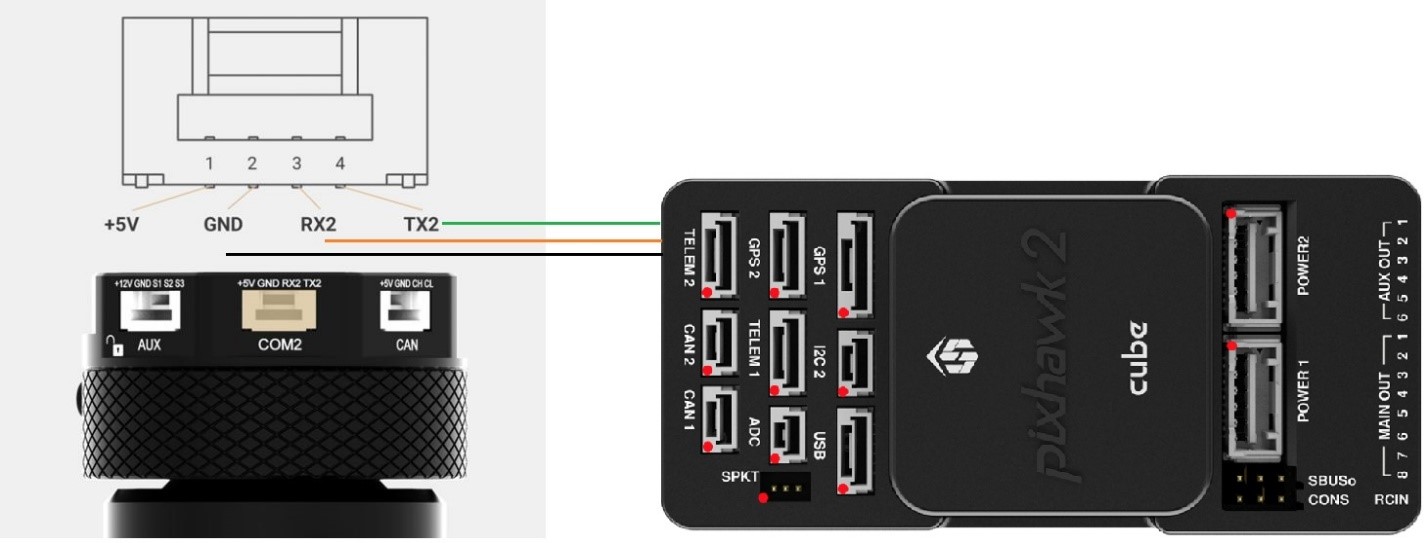
NOTE: The remaining 3 pins (VCC, RTS, CTS) of the cable should not be connected.
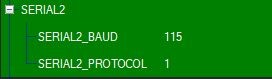
3.4. Set-up through the Mission Planner (Mavlink protocol)
Through your GCS (i.e MP’s Full Param List or Tree) set the following parameters:
Using Telem 2
- SERIAL2_BAUD 115
- SERIAL2_PROTOCOL 1
Using Telem1
- SERIAL1_BAUD 115
- SERIAL1_PROTOCOL 1
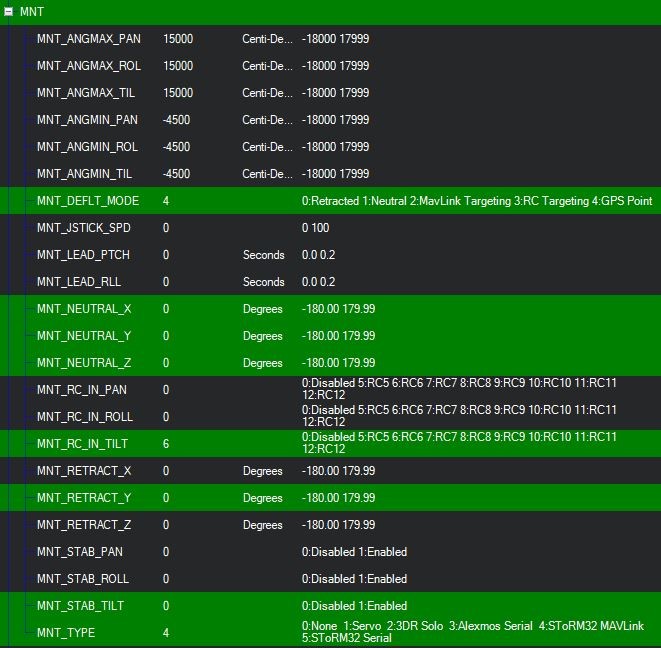
Set up MNT parameter
- Set “MNT_TYPE” to “4” to enable the Mavlink protocol
- Set “MNT_RC_IN_TILT” to “6” if you wish to control the gimbal’s tilt (aka pitch angle) with your transmitter ch6 tunning knob (Single Mode).
Set the MNT_ANGMAX_PAN, MNT_ANGMAX_ROLL, MNT_ANGMAX_TILT and MNT_ANGMIN_PAN, MNT_ANGMIN_ROLL, MNT_ANGMIN_TILT to match the range of gimbal (S1, T1, T3). For examble, the screenshot below shows setup in which the gimbal S1 has:
- PAN axis control: MNT_ANGMIN_PAN = -160 to MNT_ANGMAX_PAN = +160.
- TILT axis control: MNT_ANGMIN_TILT = -135 to MNT_ANGMAX_TILT = +90
- ROLL axis control: MNT_ANGMIN_ROLL = -45 to MNT_ANGMAX_ROLL = +45
3.5. How to control gimbal
This introduction assume that gimbal have already been connected and configured
In single mode
- Set “MNT_RC_IN_TILT” to “6” if you wish to control the gimbal’s tilt (aka pitch angle) with your transmitter ch6 tunning knob (Single Mode) or another channel.
- Set “MNT_DEFL_MODE” to “3” that is the RC targeting mode.
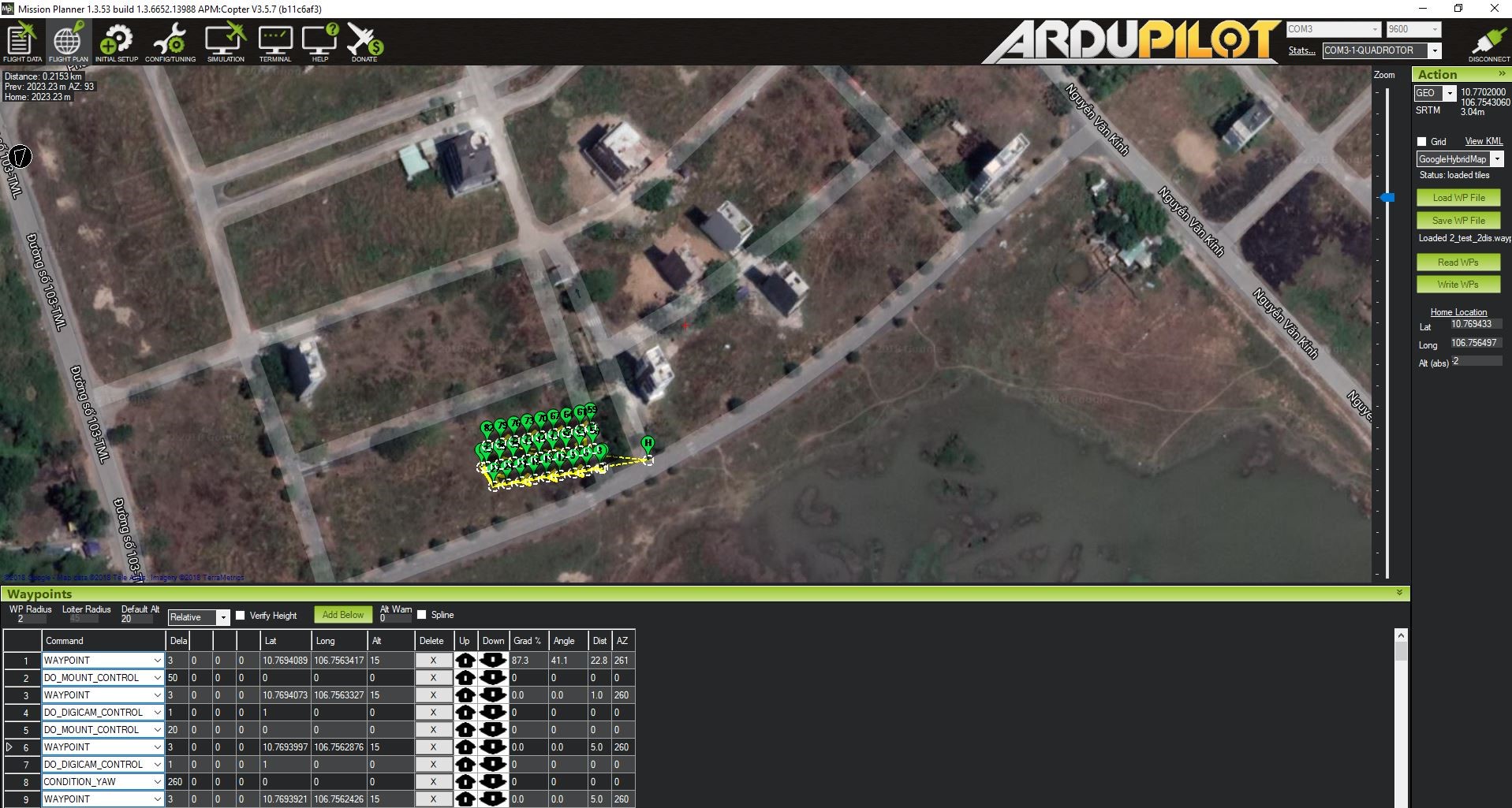
In Mission Planner to define camera survey missions
If a camera gimbal is used, you can set the camera position (yaw, roll, titl) or aim it at specific region of interest (ROI).
Set “MNT_DEFL_MODE” to “4” that is the Mavlink targeting mode.
DO_SET_ROI – Target the camera towards a specified region of interest (Position, including altitude)
DO_MOUNT_CONTROL – Position the gimbal with the specified roll, pitch, yaw
3.6. How to configure gimbal
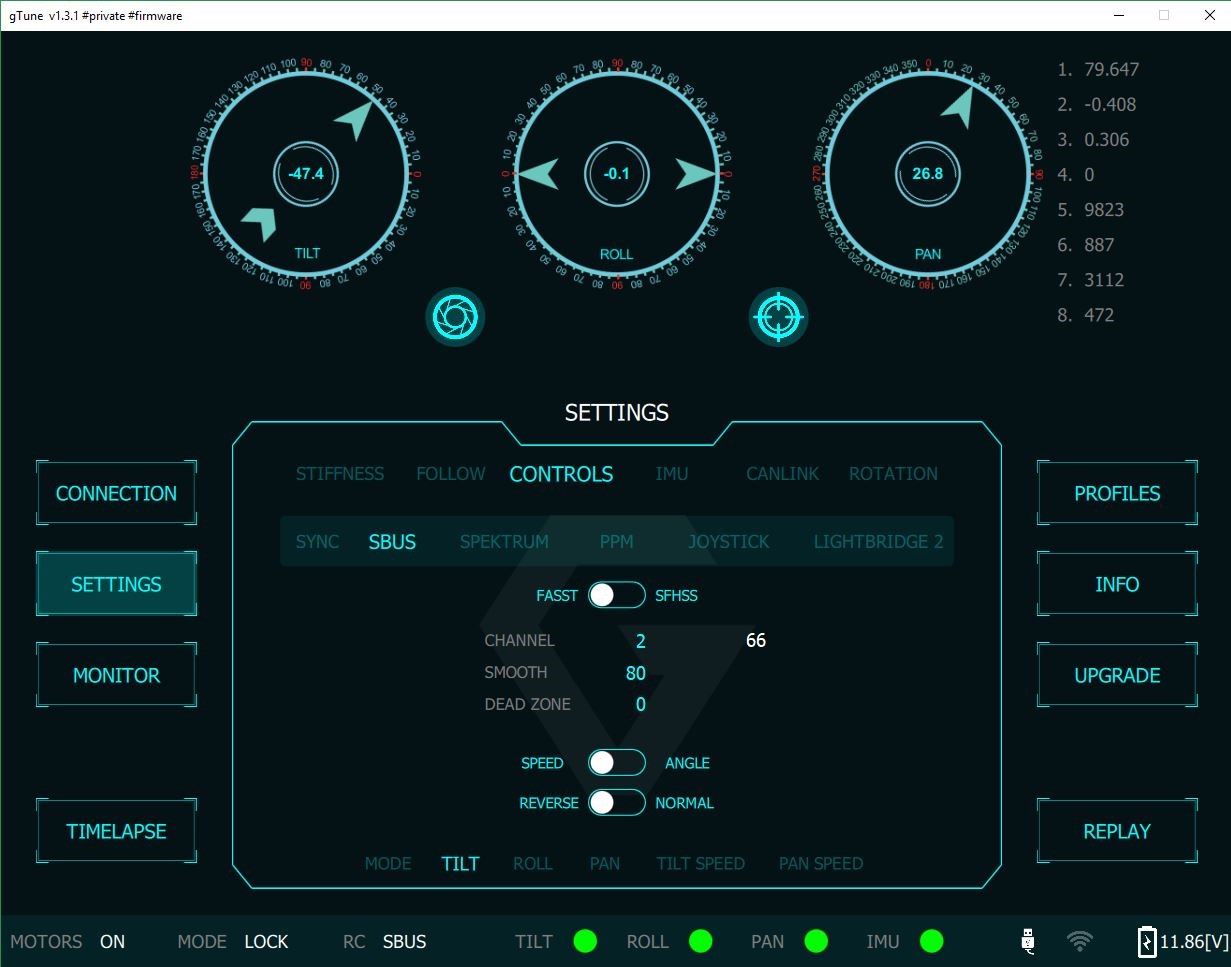
Smooth
- Smooth out the camera movement by adjusting this parameter. The higher the value is the smoother camera move but at the expense of more delay in following the movements
GTUNE à SETTINGS à CONTROLS à SBUS
Smooth value in range [0:100]
3.7. How to run application
When the first turn on the motor, make sure the pan axis is aligned with the forward direction of the copter in order for the gimbal to calculate the attitude correctly.
After turning on the motor, the LED status turns to the pink color indicating that CANLINK connection between gimbal and flight cotroller has been established.
NOTE: To control gimbal should be switch gimbal to Lock Mode.